
汽车毫米波雷达
汽车前碰撞预警毫米波雷达是专用于机动车驾驶辅助系统ADAS(Advanced Driving Assistant System)的微波雷达传感器,主要用于主动碰撞避免或预碰撞系统(Collision avoidance system或Precrash system)、自动紧急制动系统(AEB)、自适应巡航系统ACC(Adaptivecruise control)、盲点检测BSD(Blind spot detection)、前防追尾预警(FCW)、车道改变辅助(LCA)/ 偏移报警系统LDWS( Lanedeparture warning system)、TTC 安全车距预警、后方横向交通告警(RCTA),辅助机动车完成障碍物规避功能。
汽车前碰撞预警毫米波雷达则克服了红外、激光、摄像头(光学技术价格低廉且技术简单,但全天候工作效果不好)、超声波(受天气状态影响大,探测距离短,多用于倒车保护)上述几种探测方式在汽车防撞探测中的缺点,具有稳定的探测性能和良好的环境适应性。不仅可测量目标距离,还可测量目标物体的相对速度及方位角等参数,是未来无人自动驾驶的必选传感器。此外,毫米波雷达结构简单、发射功率低、分辨率和灵敏度高、天线部件尺寸小,已成为汽车主动防撞雷达的首选。
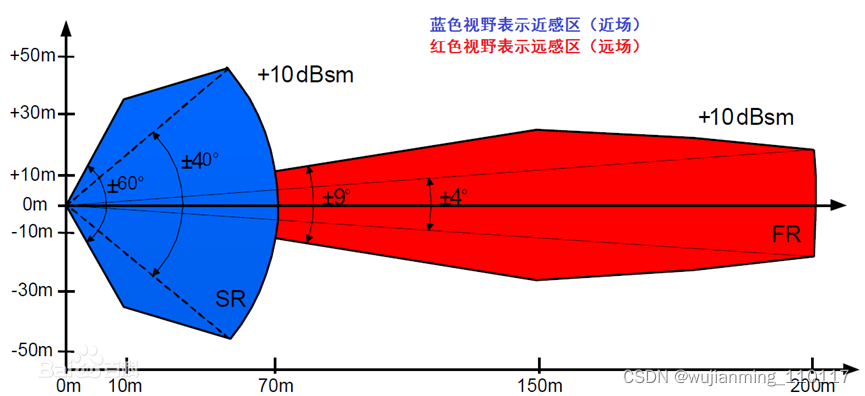
当前的汽车前碰撞预警毫米波雷达主要有24GHz和77GHz两个频段。Wayking24GHz雷达系统主要实现近距离探测(SRR)已经广泛用在植保无人机做为定高雷达使用,而77GHz系统主要实现远距离的探测(LRR),或者是两种系统结合使用,实现远近距离的探测。
汽车前碰撞预警雷达微波防撞系统:当前市场上的代表厂家有:荷兰NXP(恩智浦)、德国的Continental(大陆)Bosch(博士)、Wayking(渭成)。
毫米波雷达历史
1941年6月22日,纳粹德国在损失飞机1977架、飞行员2585人的情况下,仍无法取得英吉利海峡的制空权优势,更无法借由空袭瓦解英国的地面和海军战力,不得不放弃入侵英国的"海狮计划",持续一年多的不列颠空战以纳粹德国的失败而告终。英国之所以能够抵得住德国战车的进攻、赢得不列颠空战,(主要是这战车过不了海)除了"喷火"和"飓风"这样的明星战机发挥巨大作用外,还有一个幕后大功臣—被称为"本土链"(Chain Home)的对空雷达。
世界上第一部实用化的雷达就是由那位发明蒸气机的詹姆斯·瓦特的后代、英国科学家罗伯特·沃森·瓦特爵士研制。为尽可能早的对纳粹飞机进行预警,1936年5月英国空军决定在本土大规模部署这种雷达,也就是"本土链"雷达的雏形,到1939年初,共有20个雷达站投入使用。在纳粹德国"海狮计划"实施前,英国已建成了2道雷达探测网,共51座雷达站。这些雷达为抵御德国空军的空袭做出了重要贡献,从此开启了后续毫米波雷达在各个领域广泛应用的八十年。

英国本土链"雷达
在车载毫米波雷达研究方面,欧美国家也一直走在世界前列,博世、大陆、海拉等几家公司垄断全球市场。毫米波雷达在汽车领域的应用可以追溯到80年代初期。一些欧美国家的大学和研究机构逐步开始车载毫米波雷达技术的研究。80年代中期,欧洲制定"欧洲高效安全交通系统计划"(PROME THE US),引发了欧洲、日本等汽车大国的雷达技术研究和发展。1995年,三菱汽车基于毫米波雷达在Diamante上首次使用了"车前距离控制"系统(PreviewDistance Control),不过这套系统只能算是自适应巡航的早期版本,因为只是通过控制油门以及降挡来降低车速,自身并不会干预刹车。直到1999年,奔驰在S级上面首次应用了真正的自适应巡航系统,开启了辅助驾驶的时代,名字想必大家都不陌生,叫做Distronic。早期的车载毫米波雷达芯片主要采用砷化镓(GaAs) 工艺,一个毫米波雷达中需要至少配备7到8颗以上的RF芯片,且工作在24GHz频段,雷达波长较长,导致毫米波雷达体积过大、过于笨重,大概有笔记本电脑体积那么大。所以成本也非常昂贵,类似于今天的激光雷达,只能应用在少量的高端车型上。2000年初,锗硅(SiGe)工艺的发展,大大提高了毫米波雷达芯片的集成度,一个毫米波雷达只需要2到5颗MMICs、1到2颗BBICs,成本下探到千元级别,但是渗透率仍然很低,目前中高端车型中普遍采用的量产77GHz毫米波雷达就是采用这种工艺。2017年,TI推出了基于CMOS工艺的高集成度77GHz毫米波雷达芯片,适用于中短距场景的AWR1642 系列将前端MMIC RF、DSP和MCU三个模块集成在一个77GHz毫米波雷达SOC芯片上,显著降低了毫米波雷达成本,大幅拉低了车载毫米波雷达的硬件开发难度。更牛逼的是,针对近距离场景,TI打造了集成度更高的天线片上集成(AoP)芯片,将天线集成在芯片里,碎了天线工程师的饭碗,将毫米波雷达价格拉低到百元级别。众所周知,相比其他雷达芯片厂商,TI芯片开发具有傻瓜式的特点,底层软件开发很完备,工具链做的很容易上手,极大的降低了入门门槛,国内基于此芯片开启了轰轰烈烈的车载毫米波国产化的征程,短短几年间,国内开展车载毫米波雷达产品研发的阿狗阿猫公司已经达到大概3,40家,不可谓不热闹,不可谓不壮观。

早期奔驰S级车上的自适应巡航系统
国内车载毫米波雷达产品研发历史并不长,短短6~7年的时间,处于起步阶段。目前为止真正做到大批量交付的也就上汽集团下属零部件公司-华域汽车,年出货量达到20万颗以上。作为国内车载毫米波雷达行业的黄埔军校,华域汽车(以下简称华域)开国内之先河,2014年最早开展车载毫米波雷达产品的研发。但那个年代不比现在,77GHz毫米波雷达芯片在6年前还是高端新鲜玩意,老外禁运,不带玩,所以华域只能从24GHz毫米波雷达作为切入点。虽然是本地土豪上汽集团的亲儿子,标准的"富二代",但当时华域的车载雷达初创团队背景和实力并不比现在的雷达创业公司强到哪里去,开始都是一帮PEPS产品背景的跨界工程师,跟毫米波雷达没有半毛钱关系,除了有钱、啥都没有的情况下,不知深浅、敢为人先,一头扎进了毫米波雷达研发的大浪潮中。对于车载毫米波雷达这种技术门槛高、市场门槛高、产品化难度又大的产品来讲,没有专业的研发团队确实是个很大的问题。但是,只要有钱,就一切都不是问题了。据说当时为了把牛人们忽悠到手,面试地点都安排在威海路489号,上汽的高逼格加持,豪华的办公环境,自动加热和冲洗的马桶,诱人的食堂,难以抗拒的薪资,动人的情怀,华域HR为了招募团队,简单粗暴、惨绝人寰,使出了浑身解数,处处彰显着四个字:"老子有钱"。当然做惯了洋买办的部分总部大佬们,习惯了能用钱买来的、绝不愿费劲巴拉自己做的作派,对土鳖团队的自主研发能力还是持怀疑态度的,所以华域一开始为了确保研发成功,采用了双保险策略:国外技术引进和自主研发并行的路子。国内团队自主研发,同时从smartmicro,大名鼎鼎的SMS那儿购买方案。据说为了跑步快进,同质电子和德赛西威搞雷达也是买的SMS家的方案。当然,Rohling老爷子做买卖鬼得很,只卖方案,核心技术是不会给半点的。Rohling老爷子学识渊博,在多种雷达研究上具有很深的造诣,但是在产品化上还有些欠缺,比如当初为华域设计的雷达方案,成本没有竞争力。当然可喜的是,华域的本土团队攻坚克难、披荆斩棘,最后还是实现了国内第一个24GHz雷达的大规模量产,有了0到1的突破之后,后续77GHz的角雷达和前向雷达也很快的实现了量产。除了华域之外,森斯泰克抱着海康的大腿,在智能安防和交通方面的雷达出货量也很不错的,但是在车载雷达方面没听说他们家有大规模出货量。其他大部分车载毫米波雷达研发公司,目前还处于PPT和公众号阶段,号称做到量产的,也都是拿小批量样件给客户做个测试。毕竟车载毫米波雷达的门槛还是很高的,核心技术目前业内还没有普及,国内真正掌握核心技术的大牛就那么几个,一个巴掌的手指头都可以数的出来。包括雷达量产了近20年的博世、大陆和海拉等,团队中掌握核心关键Knowhow的就那么几个专家。此外,对于前向雷达,涉及到制动、转向和动力系统,这些核心执行机构都掌握在博世、大陆等巨头手里,人家用自己的毫米波雷达,控制自己的执行机构,提供整套方案容易的很。国内厂商还几乎没有自己的执行机构,所以前向雷达很难做。做个Demo输出个点云,对每一家来说都相对来说比较容易,但是真正走向量产且BOM成本和性能可以跟ABCD掰手腕,还需要加深对雷达的认知,包括大量的系统、软件、硬件核心技术需要突破,尤其是算法难题需要攻克。所以国内很多毫米波雷达初创公司,开始转向智能安防和智能交通领域,这些领域的毫米波雷达相对技术难度低、市场门槛没有汽车行业高、利润有点暴力,能够在短时间内看到回报,对初创公司而言,活下去才是第一目标,节操和初心是像贾布斯那样,让人窒息来用的。做车载毫米波雷达是一个费力不讨好的力气活,不仅需有大腿可以抱着,愿意带着你玩,而且技术和市场门槛比较高、利润率低,量上不去的话,基本是赔钱买卖,除非能做到像Mobileye那样敢叫板"老子天下第一"。
除了传统ADAS毫米波雷达之外,面向高级别自动驾驶的高精度感知需求,具有高分辨点云成像能力的4D毫米波雷达成为近两年的行业热点,国内外一些巨头和初创公司都在聚焦这一新概念产品,目的是在一些场景下可以替代或者弥补激光雷达,毕竟激光雷达的成本和可靠性在近阶段还是难以落地的,在雨雪等恶劣天气下也需要毫米波雷达担当精准、稳定感知的重任。所谓4D,就是3D轮廓高分辨点云轮廓和高精准的速度信息,好比将航母上的相控阵雷达所具备的能力浓缩到一个苹果手机大小的雷达上,技术难度比传统的ADAS毫米波雷达还是大幅提升。当前4D毫米波雷达雷达主要是两种主流路线,一种是采用传统MMIC RF芯片进行多片级联的方式,形成多发多收天线阵列,通过天线阵列布局和算法优化得到4D点云成像,比如博世的LRR5至尊版、大陆的ARS540、以及我司的产品等等,都是采用这种路线;另一种路线,是采用自研大规模多通道片上集成芯片, 比如以色列的Vayyar、Arbe等等,都是一颗芯片上集成48个接收通道+48个发射通道及天线。目前大陆ARS540已经有初步样机,但没见到公开测试结果,据说是为宝马电动车iX定制。距离可以探测到300m,水平角度分辨率达到1.2°1.68°,俯仰角度分辨率2.3°;博世的LRR5水平角度分辨率约2°,俯仰角度分辨率约2.2°;Arbe官网宣称水平角度分辨率可以做到1°,俯仰角度分辨率2°。不管哪种技术路线,各家的雷达体积都差不多,大概都在12cm13cm3.5cm左右,说明大家都还没有突破天线孔径与角度分辨率之间的理论约束,要想分辨率高,必须增加天线阵面的物理尺寸。Oculii介绍自己的虚拟成像技术可以将天线通道数扩展10100倍,具备这样的技术,但是在实际应用中意义并不是很大。目前业内通常采用4片级联或者两片级联来增加收发通道数,结合MIMO技术来形成大规模虚拟阵列来提高水平向和俯仰向的角度分辨率,这种方式虽然可以相对节省成本,但是会带来相应的问题,即不模糊速度范围大幅降低,如何解决这一问题也是多片级联MIMO毫米波雷达的一个瓶颈,所以看到国内很多雷达厂商只使用多片级联中的2个发射通道,浪费掉剩余的发射通道来避免速度解模糊问题。通过级联4片Ti的AWR2243,4D毫米波雷达水平分辨率可以做到1°,俯仰角度分辨率在1.4°以内,最大不模糊测速范围可以达到-250km/h~+250km/h,对周围的环境和目标实现高分辨成像,相关产品已经在几家车厂的L3和L4自动驾驶上应用。在产品开发过程中,突破了以下几个核心关键技术:
- 大规模虚拟天线设计技术,大幅提高水平和角度分辨率
- 高频RF板的多层叠构设计和混压技术,保证产品的低成本和良品率
- 大规模天线的水平和俯仰校正快速技术
- 满足自动驾驶需要的雷达复杂波形设计技术
- 最大不模糊测速范围扩展技术,满足高速场景精准测速的要求
- 扩展目标的聚类跟踪技术,得到目标精准的3D BoundingBox信息
当然,以上介绍的几项技术只是简单的举例,要想实现毫米波雷达的产品化,还有大量的工具链问题、工程技术问题和算法问题需要解决。先前与众多技术团队交流发现,团队实力虽然PR得震天响,但实际水平参差不齐,就连BSD毫米波雷达都处在摸着石头过河阶段,逞论难度技术更高的前向雷达和4D毫米波雷达了。有感于车载毫米波雷达入门门槛高、技术难度大、国内相关技术底子薄的现状,业内也缺乏系统介绍车载毫米波雷达技术的参考书籍和资料。
前方探测传感器采用宽波束毫米波雷达,覆盖范围为前方70度角度内200米距离内的最多32个目标。可以及时有效的选择车辆正前方的危险目标进行预警目标跟踪。除了对同向正常行驶的车辆,同时对插队车辆,横穿车辆均能很好探测。
毫米波雷达的产品有这些
77G雷达;24G雷达;77G雷达用MMIC;77G雷达用PCB;24G雷达用MMIC;24G雷达用PCB。
汽车前碰撞预警防碰撞预警系统进行三级预警,(可根据客户需求进行多级别预警定制),安全预警三个级别分别为:
第一及第二级为安全距离预警,固定时间预警,根据本车速动态调整,速度越快,提醒距离越远。智能提醒用户在不同车速情况保持安全车距。
第三级为碰撞预警,固定预警时间,通过雷达测定相对速度,可理解为目标车与本车的速度差。本车速度大于前车速度,有撞击可能,速度越大,提醒距离越远。
前向雷达:AEB(自动制动),FCW(前方碰撞预警)ACC(自适应巡航控制)。
后向雷达:BSD(盲点探测),LCA(变道辅助),RPC(后方碰撞预警),RCW(后碰撞预警)。
参考链接:
https://mp.weixin.qq.com/s/S4qqbAI9tbNQQzCv6CzafQ
Original: https://blog.csdn.net/wujianing_110117/article/details/123159510
Author: wujianming_110117
Title: 汽车毫米波雷达