
一、两者的概念
ASR:语音识别。通俗的来讲,就是将语音信号转化成文字文本,并加以输出(显示在屏幕上面)。 这个过程,机器并不知道你说的是什么,可以说就是单单的实现了两种信号的转化。而且概念本身就已经说明了,信号初始状态只能是语音信号,也就是人们说的话。所以ASR又可以理解为, 让机器听见。
NLP:自然语言处理。通俗的讲,通过某种算法让计算机理解所输入的内容,理解的意思就是,比如:输入"开门",机器人的下一个动作就会是把门打开。这个过程中, 输入的可能不是语音信号,也可以是键盘敲进去的,或者是用笔写上然后机器进行识别等等形式。所以,NLP又可以理解成,让 机器听懂。
二、两者的区别
通过以上的解释,那可能有的人就会认为,听懂不应该是先听见吗?那NLP包括ASR。答案是:语音输入只是一个输入的形式之一,但是不绝对,还有其他行形式的输入。所以, 听懂不一定听见。
紧接着就会有一个概念就是, 听见不一定听懂,上面已经说了ASR就是信号的转换,不代表机器已经理解说话的内容。
这个地方再举个例子吧!开车的都用谷歌或者百度地图。当我们想去某个地方的时候,可以用语音输入,然后在手机上上会显示出说话的内容。这个阶段就是语音识别(ASR)的领域。后面,手机然后进行定位,这个可以理解成自然语言处理(NLP)的领域了。
综上, 只能说两者存在着交集,但是却是两个不同的领域。
Original: https://blog.csdn.net/hahahahahahq/article/details/116861321
Author: 头上化佛
Title: 自然语言处理(NLP)和语音识别(ASR)的区别
相关阅读1
Title: 可能是最全的|适合决策AI研究的自动驾驶模拟器评测(下篇)
原创不易,大家多多鼓励呦,OpenDILab继续出精品。错过上次评测推送的,可戳如下链接。
上期我们的评测总结如下:
CarSim是 目前最接近真实世界的驾驶模拟器之一,是考虑车辆动力学模型下最适用于自动驾驶仿真研究的模拟器,主要用于 车辆机械结构 、传导和动力系统、能源消耗等车辆工程问题;
Carla是由英特尔实验室联合巴塞罗那计算机视觉中心开发的自动驾驶仿真模拟器,主要 针对单车视角的城市驾驶环境,用于从传感信息出发,训练驾驶策略得到控制信号。Carla是目前学术界关注最多,也是研究领域使用并产出最多的自动驾驶仿真软件,一些由Carla团队或其他团队开发代码库在基本功能上继续扩展了其他内容,如支持场景构造和测试的Scenario Runner、强化学习环境Gym-Carla、 全面的决策AI自动驾驶训练和测试平台DI-drive等;
SUMO 的全称是Simulation of Urban Mobility,是一款路网交通仿真模拟器。SUMO主要是 从交通路网和车流的层面出发,进行自动驾驶和交通流的仿真,支持对道路和车道的编辑,车流和信号灯的定义等。
本期继续为大家介绍其它几种自动驾驶模拟器
04 AirSim
AirSim是微软开发的另一个基于Unreal Engine 4,贴近真实的自动驾驶仿真软件,开始是针对四旋翼飞行器的模拟器,后来添加了对自动驾驶的支持。 AirSim支持多种车辆物理模型,具有逼真的虚拟环境,多种基于图像的传感器和惯导、地磁、气压、雷达等传感器,简单方便的Python和C++ 等接口,可以运行在PSX等平台上进行手动控制。最新的AirSim还提供了Unity引擎的版本,拓展了系统支持,降低了修改难度。
AirSim是一款主要针对单车视角的,基于城市和野外环境的驾驶仿真软件,在多种传感器信息的基础上,开发自动驾驶策略,得到车辆控制信号,驱动单车完成巡线任务。

AirSim运行示例
与Carla一样,AirSim对环境的逼真渲染需要对系统和计算资源,尤其是显卡性能有一定要求。相比起Carla,AirSim相对缺少针对AI研究的一些基建和学术氛围,AirSim里面和自动驾驶决策AI有关的模块较少,如强化学习环境构件、巡线信息和周围环境的一些语义化信息获取等,目前主要支持端到端的策略训练,更复杂的实验需要进行较多的开发。AirSim上也缺少一些已有的实验结果和Baseline方法以及标准测试场景以供对比。
AirSim官网链接:
https://microsoft.github.io/AirSim/
05 TORCS
TORCS的全称是The Open Racing Car Simulator,是一款开源的赛车模拟软件。TORCS 最早被用来进行不同赛车AI之间的竞速比赛,现在被越来越多地用于自动驾驶算法研究。 TORCS包含若干数量的车辆和赛道,具备图形化界面和简单的3D渲染,还有一些包含环境语义信息的传感器等。TORCS的场景相对丰富,有城市、乡村等不同地图,但道路主要是竞速赛道,不包含驾驶任务常遇到的交叉口、并道等场景,他车也主要是以竞速为目标而非一般的驾驶行为。
TORCS底层由C/C++实现,用户可以查阅API以定制不同驾驶策略,从而与驾驶环境交互,获取传感信息等。TORCS的3D渲染相对简单,主要用于可视化而非作为驾驶AI的感知输入信号。TORCS的设计初衷是提供一个以竞速为目标的驾驶算法开发和对战平台,其对环境和感知信息的设计、地图设计以及完成指标更加接近于赛车任务。但竞速驾驶也可以被视作是自动驾驶的一个应用方向,自动驾驶算法的有效性和性能上限也可以在竞速驾驶任务中得到验证。

TORCS运行示例
TORCS官网链接:
http://torcs.sourceforge.net
06 V ISSIM
VISSIM是德国PTV 公司开发的一款交通流仿真软件。比起SUMO,VISSIM拥有更美观的仿真界面,可以建立各种复杂的交通环境,如Highway、Parking、Roundabout等,支持导入真实的地图和路网场景。 VISSIM还拥有各种不同类型的车辆以及行人,可以在非常贴近真实的仿真场景中,对交通流、交通设施以及一些局部变化对交通产生的影响等进行测试。VISSIM可以通过Python、MATLAB等开发接口同环境进行交互,支持不同角度的可视化,可以对结果进行评价和分析。VISSIM也可以控制单车来进行自动驾驶算法的研究。
VISSIM是目前工业界在交通领域应用最广泛的仿真软件,其缺点是尚未开源,正版价格昂贵,在一些细节使用上不够灵活,仿真速度也没有SUMO快。同SUMO一样,VISSIM的驾驶模型相对简单,想实现针对单车的精细规划和控制需要额外的开发工作。
VISSIM官网链接:
https://www.ptvgroup.com/en/solutions/products/ptv-vissim/

VISSIM使用示例
07 CarSim
MetaDrive是今年8月新发布的一款轻量且易于安装,为决策AI方法在自动驾驶问题上应用而准备的模拟器。MetaDrive的前身是PGDrive,是依靠大量过程生成(Procedural Generated)的场景进行强化学习驾驶训练的工作。MetaDrive在其基础上改进成为了一个更易于其他自动驾驶任务使用的仿真器。 MetaDrive保留了PGDrive的优点,包括近乎无限数目的路网和车流,并且能够导入真实数据进行训练。MetaDrive拥有简单的驾驶模型,具备3D渲染和可视化界面,比起Carla和AirSim,MetaDrive的环境渲染不包括道路以外的物体,因此更快更小,性能更强大。
MetaDrive包含若干标准的强化学习环境接口,提供完备的编造功能,通过Python拓展,算法研究者可以迅速搭建自己想要的场景,自定义奖励和观测形式(Lidar、相机、俯视语义图等),和引入新的车辆和物体,以研究Multi-agent、Safety RL、Multi-modality等各式各样的强化学习研究问题。
MetaDrive非常轻量化,整个库大小为50mb,可以通过pip一键安装,立即使用。基于Panda3D及其内置的Bullet引擎,MetaDrive还可以在保证车辆动力学的基础上实现300+FPS(单智能体)或80+FPS(40个智能体)的仿真效率。
MetaDrive的缺陷是道路之外的环境和渲染相对低级,图像传感的真实性较低,不适合做从图像传感出发的驾驶策略训练。

MetaDrive运行示例
MataDrive官网链接:
https://github.com/decisionforce/metadrive
总结
以上针对各种单车、多车、竞速、底层动力驾驶仿真器进行了详细的对比与分析。 从个人研究者角度出发,我们认为最合适做单车驾驶仿真的是CARLA、MetaDrive仿真器,最适合做交通流驾驶仿真的是SUMO仿真器。
当然,这些仿真器都各有优缺点,应对具体任务进行分析和调研,选取最合适的仿真器来进行实验。

github.com/opendilab/
进入opendilab了解更多开源信息~
Original: https://blog.csdn.net/m0_55289267/article/details/123387054
Author: OpenDILab开源决策智能平台
Title: 可能是最全的|适合决策AI研究的自动驾驶模拟器评测(下篇)
相关阅读2
Title: 使用Huggingface在矩池云快速加载预训练模型和数据集
作为NLP领域的著名框架,Huggingface(HF)为社区提供了众多好用的预训练模型和数据集。本文介绍了如何在矩池云使用Huggingface快速加载预训练模型和数据集。
1.环境
HF支持Pytorch,TensorFlow和Flax。您可以根据HF官方文档安装对应版本,也可以使用矩池云 HuggingFace镜像(基于Pytorch),快速启动。

如果使用其他镜像,你需要手动安装 transformers 和 datasets 两个包:
pip install transformers datasets
HF具体使用方式和代码请参考官方https://github.com/huggingface/transformers
2.预训练模型
2.1 预训练模型简介
HF里有非常多的预训练模型,支持不同软件版本,可用于Pipeline和模型微调。你可以选择从HF官方Model Hub下载预训练模型(可能耗时较长),另外矩池云提供了部分常用的预训练模型。访问路径: /public/model/nlp/
预训练模型名称(定时更新,也可以联系矩池云小助手补充):
模型名称 albert-base-v2 albert-xxlarge-v2 bert-base-cased bert-base-chinese bert-base-uncased bert-large-uncased xlm-roberta-base chinese-bert-wwm-ext chinese-electra-180g-base-discriminator chinese-roberta-wwm-ext clip-vit-base-patch32 code_trans_t5_small_program_synthese_transfer_learning_finetune deberta-v3-base deberta-v3-large distilbart-cnn-12-6 distilbert-base-uncased-finetuned-sst-2-english distilgpt2 gpt2-chinese-cluecorpussmall gpt2 roberta-base t5-base xlm-roberta-base
2.2 预训练模型使用方法
首先需要将自己需要使用的预训练模型zip文件解压到矩池云网盘或者机器中其他目录(存到网盘后下次可以直接使用),使用模型时填入本地存储路径即可调用。
以使用 albert-base-v2模型为例子:
- 解压
unzip /public/model/nlp/albert-base-v2.zip -d /mnt/
- 代码中使用
如果环境中没有 transformers包,可以先 pip install transformers安装。
from transformers import AutoModel
model = AutoModel.from_pretrained('/mnt/albert-base-v2')
# 注意 /mnt/albert-base-v2 是你解压后模型文件所在路径
3.数据集
3.1 数据集简介
数据集存放路径: /public/data/nlp
数据集名称(定时更新,也可联系矩池云小助手):
名称 描述 dbpedia_14 基于DBpedia2014的14个不重叠的分类数据集,包含40,000训练样本和5,000测试样本。源自维基百科的语义词条 glue 通用语言理解评估基准,面向9项任务的数据集,参考gluebenchmark newsgroup 用于文本分类、文本挖据和信息检索研究的国际标准数据集之一。数据集收集了大约20,000左右的新闻组文档,均匀分为20个不同主题的新闻组集合 squad 斯坦福问答数据集,一个阅读理解数据集 super_glue 更新版的Glue数据集 wikitext 英语词库数据是由Salesforce MetaMind 策划的包含1亿个词汇的大型语言建模语料库。这些词汇都是从维基百科一些经典文章中提取得到 yahooAnswers 数据集源于 Yahoo!Answers Comprehensive Questions and Answers 1.0 的 10 个主要分类数据,每个类别分别包含 140000 个训练样本和 5000 个测试样本 yelp_review_full 这个数据集是Yelp业务、评论和用户数据的一个子集。包含大量的评论、业务、用户、提示和签到数据
3.2 数据集使用方法
首先需要将自己需要使用的数据集zip文件解压到矩池云网盘或者机器中其他目录(存到网盘后下次可以直接使用),使用数据集时在代码抬头添加代码 from datasets import load_from_disk,并将代码中加载数据集函数 load_dataset更改为 load_from_disk(数据集存放路径)即可。部分数据集需指定Subset。
以使用 dbpedia_14数据集为例子:
- 解压,将数据集解压到网盘中(确保网盘空间足够)
unzip /public/data/nlp/dbpedia_14.zip -d /mnt/
- 代码中使用
如果环境中没有 datasets包,可以先 pip install datasets安装。
from datasets import load_from_disk
data = load_from_disk('/mnt/dbpedia_14')
# 注意 /mnt/dbpedia_14 是你解压后数据集文件所在路径
Original: https://www.cnblogs.com/matpool/p/16517655.html
Author: 矩池云
Title: 使用Huggingface在矩池云快速加载预训练模型和数据集
相关阅读3
Title: #问题及解决方案整理# | python | anaconda+TensorFlow软件安装运行中的各种问题(已成功解决)
#问题及解决方案整理# | python | anaconda+TensorFlow软件安装运行中的各种问题(已成功解决)
背景
运行环境:Windows 10,anaconda,python3.9.7,TensorFlow
————————————————————————————————————————————
常用指令
查看conda的版本
conda --version

查看python的版本
python

查看anaconda安装了哪些环境变量
conda info --envs
原因及解决方案:
在安装完成anaconda环境后,在anaconda prompt下安装tensorflow。于是出现了上述问题。
分析原因得到,下载安装包的镜像源连接不上,需要更换下载源链接。
- 直接打开本地电脑上对应路径
C:\Users\Jing下的文件.condarc,打开方式为记事本就行。此处路径中的Jing对应为自己的电脑的用户名称。 - 修改文件中的内容为如下图所示:
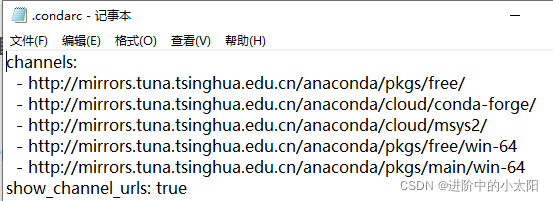
删掉默认- deault,添加几行清华镜像地址。 - 不仅可以通过文件夹添,也可以通过在命令行执行添加镜像地址。命令行的内容如下:
- 保存关闭,并重启电脑(这一步很关键!!!)。
- 重新激活tensflow的环境变量
activate py39; - 执行安装命令
pip install --upgrade --ignore-installed tensorflow; - 通过命令行启动
Spyder。
; 问题2:moduleNotFoundError:No module named 'tensorflow'

原因及解决方案:
安装完成anaconda环境后,在anaconda prompt下安装tensorflow,命令运行成功了,但是直接在"开始"列表中点击 Spyder,然后进入Spyder的开发环境。运行自己的程序,出现上述问题,显示没有tensorflow模块。
查找了网上很多资料和文章,有几个原因。
原因1:python和tensor版本不一致。
原因2:确实就是没有安装tensorflow。
原因3:python运行环境中没有配置好tensorflow,没有在tensorflow的环境下打开它们。
参考2-1
- 我们需要在tensorflow的环境中安装ipython 和Spyder两个插件。
- 打开
Anaconda Navigator,选择Not installed,找到ipython和Spyder并安装install、apply。 - 重新在正确打开的Spyder环境中运行程序,即可以正常执行,问题解决。
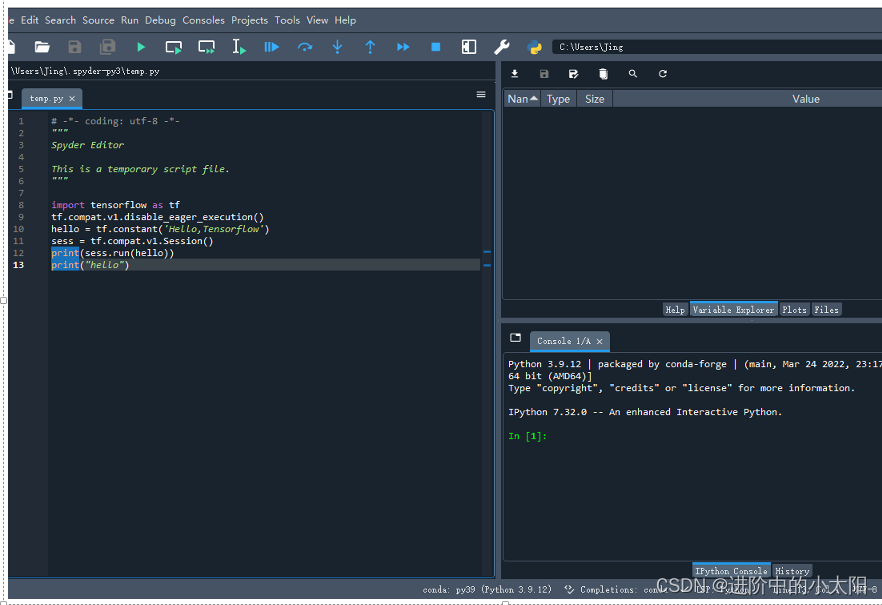
问题3:AttributeError: module 'tensorflow' has no attribute 'Session'
原因及解决方案:
在安装完成TensorFlow后,需要验证环境是否安装成功,所以使用示例程序,看是否能运行成功,于是出现了该问题的错误。
因为在新的Tensorflow 2.0版本中已经移除了Session这一模块,改换运行代码。
示例代码如下:
import tensorflow as tf
hello = tf.constant('Hello, TensorFlow!')
sess = tf.Session()
print(sess.run(hello))
参考3-1后:
- 改出错的那一行
tf.Session()的代码为tf.compat.v1.Session(),运行,问题解决。
问题4:RuntimeError: The Session graph is empty. Add operations to the graph before calling run().
原因及解决方案:
在安装完成TensorFlow后,需要验证环境是否安装成功,所以使用示例程序,看是否能运行成功,于是出现了该问题的错误。
示例代码如下:
import tensorflow as tf
hello = tf.constant('hello,tensorflow')
sess= tf.compat.v1.Session() #版本2.0的函数,这里也得注意
print(sess.run(hello))
参考4-1后:
- 加上这一行
tf.compat.v1.disable_eager_execution(),运行代码,问题解决。
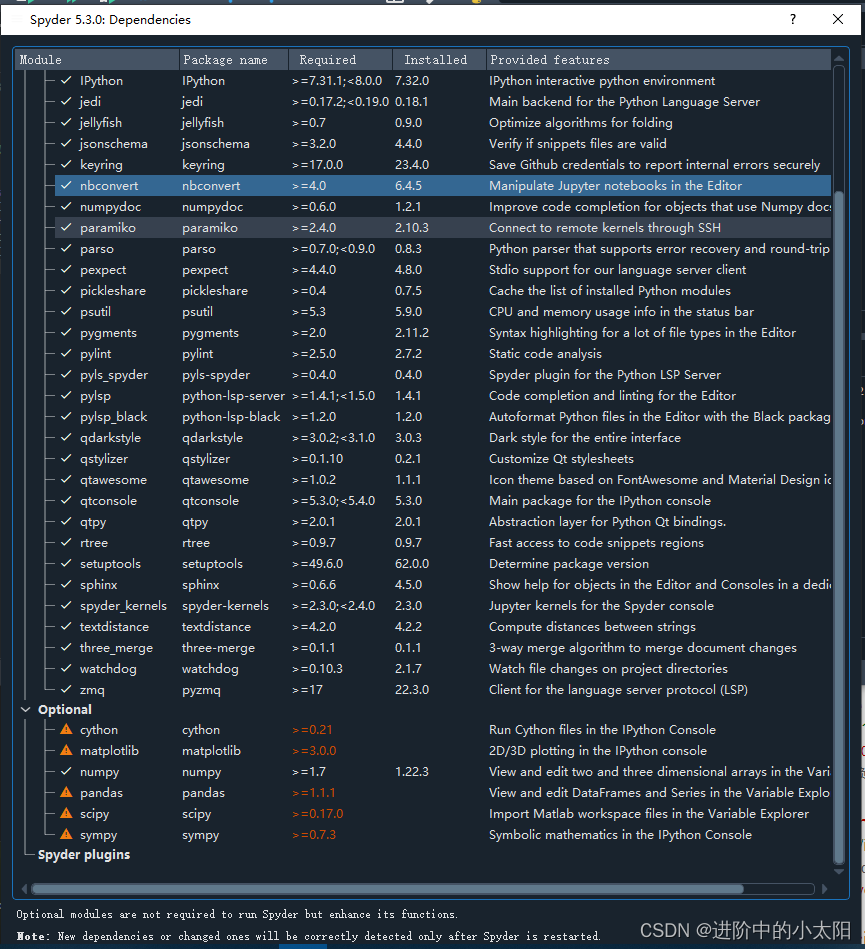
问题5:you have missing dependencies Spyder: You have missing dependencies! #Mandatory: nbconvert>=4.0
现象
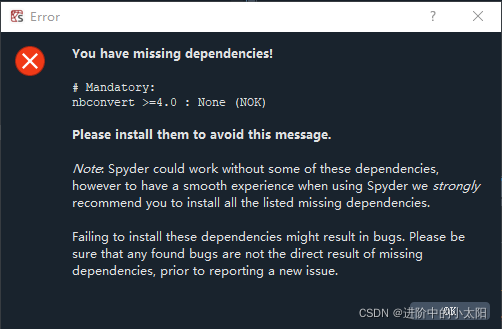
; 原因及解决方案:
参考5-1后:
- 在Spyder菜单栏选择Help–>Dependencies可以查看当前安装版本的依赖包及各自安装情况:可以看到确实少了这个包的依赖。

- 用conda list查看包情况:就在那里,列表中有该包。
- windows10 环境下执行:
conda install -c conda-forge nbconvert。
- 重新在命令行中的py39环境(改为自己创建的环境变量即可)下,输入
Spyder进入开发环境:发现没有报错了;
- 查看help的依赖包,对应的包已经有了 ,问题解决。
; 问题6:ModuleNotFoundError: No module named 'PIL'
原因及解决方案:
参考6-1:
- 退出Spyder;在命令行输入
pip install Pillow;
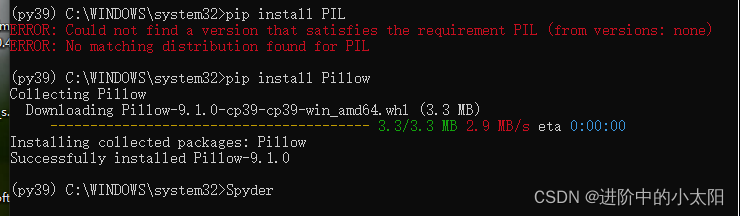
- 再次通过命令行
Spyder进入环境,运行代码,问题解决。
; 问题7:ModuleNotFoundError: No module named 'matplotlib'
现象

; 原因及解决方案:
参考7-1:
- 退出Spyder;在命令行输入
pip install matplotlib;
- 再次通过命令行
Spyder进入环境,运行代码,问题解决。
Original: https://blog.csdn.net/qq_41921189/article/details/123966135
Author: 进阶中的小太阳
Title: #问题及解决方案整理# | python | anaconda+TensorFlow软件安装运行中的各种问题(已成功解决)